تین نیوز | دو مخترع دانشکده فیزیک دانشگاه مکزیکو موفق به ساخت یک کت
هوشمند برای کاهش خطر تصادف موتورسواران و اعلام پیغام نجات هنگام برخورد
با سایر وسایل نقلیه شدند. سیستم کت هوشمند «Safe Ride» به تجهیزاتی ازجمله
چراغهای راهنما، چراغ ترمز و سیستم هشدار اعلام کمک مجهز است.
کت
هوشمند مجهز به سه قسمت پوشیده شده از چراغهای الایدی است که قسمت
بالایی مانند چراغ ترمز عمل کرده و همچنین قسمت چپ و راست نیز بهعنوان
نشانگر تغییر مسیر یا راهنما عمل میکنند. دنیل رئال و ریبرتو رایواس،
دانشجویان فیزیک دانشگاه ملی خودمختار مکزیکو در مورد فناوریهای بهکار
رفته در این کت اظهار کردند: کت Safe Ride مجهز به سیستم اعلام نیاز
اورژانسی هنگام تصادف است و در واقع هرگونه کاهش سرعت شدید از طریق سیستم
جیپیاس مشخص شده و پیغام آن از طریق گوشی هوشمند ارسال میشود. در بررسی
های انجام شده مشخص شد که با استفاده از این کت هوشمند خطر تصادف به شدت
کاهش مییابد، چرا که یکی از مهمترین عوامل حادثهساز تغییر مسیر ناگهانی
موتورسواران است که این امر از طریق چراغهای پرقدرت الایدی کت هوشمند به
سرعت به اطلاع سایر رانندگان خواهد رسید.
سیستم اعلام خطر تصادف در
این کت با اتصال به تلفنهمراه هوشمند میسر میشود. در واقع با استفاده از
سیستم مسیریاب تلفن همراه در صورت تغییر شدید در میزان شتاب یا توقف شدید
پیغام کمک با نشانهگذاری محل دقیق روی نقشه به مرکز امدادونجات ارسال
میشود. این دو مخترع قیمت نهایی و فروش محدود این کت را حدود 40 دلار
اعلام کردند.
اخبار حمل و نقل هوشمند
اخبار در حوزه ی حمل و نقل هوشمند
اخبار حمل و نقل هوشمند
مدیریت ناوگان
کنترل ناوگان
ناوگان
مدیریت ناوگان سازمانی
حمل ونقل هوشمند
اخبار حمل ونقل هوشمند
حمل و نقل هوشمند
ارتباط هوشمند
جی پی اس چیست
مدریت یک پارچه و هوشمند در بزرگراه های تهران
مدیریت ترافیک شهری
توسعه پایدار در حمل و نقل شهری
معماری سامانههای تحلیل ترافیک
انطباق دادههای خودرو بر روی مسیرهای نقشه
تشخیص الگوی تصادف
اعلام تصادف به صورت بر خط
حمل و نقل هوشمن
- تیر ۱۳۹۴ (۳)
- فروردين ۱۳۹۴ (۱)
- دی ۱۳۹۳ (۳)
- آذر ۱۳۹۳ (۵)
- مهر ۱۳۹۳ (۵)
- شهریور ۱۳۹۳ (۸)
- مرداد ۱۳۹۳ (۸)
- ۹۴/۰۴/۰۸نجات جان موتورسواران با کت هوشمند
- ۹۳/۰۹/۱۶شناخت مفهوم ترافیک

|
|
پنجمین نمایشگاه خدمات شهری، حمل و نقل و ترافیک با حضور بیش از ۳۰۰ شهرداری از شهرهای مختلف کشور با هدف رشد و ارتقای علمی و فنی شهرداریها در مشهد برگزار می شود.
در این نمایشگاه که با حضور تولیدکنندگان و ارائهدهندگان خدمات فنی و مهندسی در حوزه خدمات شهری و حمل و نقل عمومی برگزار خواهد شد، محصولاتی از قبیل ادوات و ماشینآلات سازمانی، ادوات و تجهیزات خدمات شهری، مبلمان شهری، تجهیزات پارکی و خدمات مرتبط با آتشنشانی و خدمات ایمنی در معرض نمایش گذاشته خواهند شد.
همچنین در بخش های دیگر این نمایشگاه خدماتی همچون مربوط به بازیافت مواد، خدمات مرتبط با محیط زیست شهری، خدمات مرتبط با انتقال و نگهداری درختان، درختچههای زینتی شهر، خودروهای حمل و نقل عمومی و سامانهها و علائم کنترل و مدیریت ترافیک و غیره به منظور انتقال تجربیات در معرض دید عموم قرار خواهد گرفت.
گفتنی است، این نمایشگاه با همکاری استانداری خراسان رضوی، شهرداری مشهد و سازمان همیاری شهرداریهای استان خراسان رضوی از تاریخ ۱۰ الی ۱۳ آذر ماه در محل دائمی نمایشگاه بینالمللی مشهد برگزار میشود.
لینک مطلب
|
|
ترافیک از سه عامل تشکیل میشود این عوامل عبارتند از: انسان، راه، وسیله نقلیه.چنانچه هر یک از عوامل سه گانه نباشد اصولا مساله ای بنام ترافیک وجود نخواهد داشت. بررسیها نشان داده است که بهترین راه کنترل ترافیک و به مفهوم دیگر به حداقل رسانیدن ضرر و زیان ناشی از آن، استفاده از سه گروه عواملی است که شاید بتوان آنها را به صورت سه نوع راه جهت بهبود ترافیک بیمار در این جامعه تجویز نمود که این عوامل عبارتند از:
1- مهندسی ترافیک
2- اجرای مقررات
3- آموزش در مهندسی ترافیک
راهها و تقاطع ها به منظور سهولت عبور و مرور یا مرمت احداث میگردند.
علت ایجاد ترافیک
ترافیک هم مانند عوارض یک معادله تک مجهولی نیست که با برخوردی یک بعدی بتوان آن را حل کرد. در یک دسته بندی کلی علل ایجاد ترافیک تهران را در5 بند میتوان مورد بررسی قرار داد. 1- ارزان بودن بنزین 2- کمبود شبکه های بزرگراهی درون شهری 3- کمبود شبکه حمل و نقل ریلی (مترو) 4- هوشمند نبودن ترافیک 5- عدم وجود تسهیلات در نقاط گوناگون شهر.
در مورد موضوع اول میتوان اینگونه توضیح داد که ارزان بودن بنزین موجب میشود تا صاحبان خودروهای شهری تشویق شوند تا برای تردد در شهر از خودروهای تحت تملک خود استفاده کنند در حالی که آنان برای هرموردی مجبور نیستند اتومبیل هایشان را از پارکینگ منازل خود به سطح خیابان های شهر هدایت کنند. یا از سوی دیگر کمبود بزرگراهها نیز مشکل ساز میشود.به موجب طرحی که برای تهران تهیه شده این شهر باید 600 کیلومتر بزرگراه داشته باشد این در حالی است که تهران تنها 300 کیلومتر بزرگراه دارد. کمبود این شبکه های بزرگراهی نیز به تشدید مشکل ترافیک تهران کمک میکند.
بحث شبکه حمل و نقل ریلی نیز در به وجود آمدن ترافیک اهمیت فوق العاده ای دارد.در حال حاضر تنها دو خط مترو در تهران مورد بهره برداری قرار گرفته است درحالی که در شهری مانند مادرید که نصف جمعیت تهران را دارد 17 خط مترو وجود دارد که تمام شهر را پوشش میدهد. در مورد شبکه حمل و نقل عمومی مانند اتوبوس نیز نقص هایی وجود دارد که به شدت گرفتن بحران ترافیک کمک میکند. این نکته را نیز نباید از یاد برد که لجام گسیختگی ترافیک و عدم هدایت صحیح آن در تشدید این معضل کنونی کلان شهرهای کشور و به خصوص تهران بسیار موثر است. هوشمند بودن به این مفهوم است که به کمک اطلاعات ترافیکی رانندگان خودروهای شخصی را مطلع کرد که از کدام معابر برای تردد استفاده کنند.
هوشمند کردن چراغ های راهنمایی نیز در بحث هوشمند کردن ترافیک باید مورد توجه خاص قرار گیرد. دادن موج سبز که در دنیا نیز مرسوم است به خوبی این شرایط را به وجود میآورد که حرکت اتومبیل ها در بین چهارراهها منطقی شود زیرا هنگامی که یک خودرو از یک چراغ سبز عبور میکند در مواجه با چهار راه بعدی باچراغ قرمز روبرو میشود. به این شکل در وقت او صرفه جویی میشود.
نابسامانی در توزیع امکانات در نقاط گوناگون شهر هم علت دیگر ایجاد ترافیک به شمار میآید. در کشورهای توسعه یافته تمام نیازهای شهروندان در نقاط گوناگون شهر ایجاد شده است. این امکانات شامل فروشگاهها، مراکز اداری، مراکز درمانی و مراکز آموزشی میشود. به این طریق در دسترس بودن امکانات اولیه مورد نیاز شهروندان میزان سفرهای درون شهری آنان را کاهش میدهد و به تبع آن از بار ترافیکی شهر کم میکند. برای نمونه در شهر تهران تعداد مدارس به شکل صحیحی تقسیم نشده است.
در تهران 30 درصد سفرهای درون شهری به موضوع آموزش مربوط میشود. برای حل مشکل ترافیک تهران نیز باید این 5 عامل حل شود.متولی حل این موضوعات نیز شهرداری است. اما نظام اداری کشور اجازه نمیدهد که شهرداری به عنوان نهاد مسئول درپی حل این بحران برآید.به دلیل آنکه شهرداری اختیارات کامل را ندارد، قدرت مانور کمی هم پیدا میکند. ولی در شهرهای پیشرفته دنیا قدرت تصمیم گیری زیادی به شهرداری ها واگذار شده این در حالی است که در ایران حتی شهرداری منابع درآمدی کافی نیز ندارد.اما تفکر مرکز گرایی یا سانترالیسم موجب در ایران که میان گردانندگان نظام به وجود آمده موجب شده تا این اختیارات به شهرداری واگذار نشود.
لینک مطلب
با دریافت اطلاعات مسیر حرکت خودروها به صورت برخط و تشخیص الگوی حرکتی آنها در هر بخش از خیابانها، میتوان این الگوها را با الگوهای زمان سفر که در پایگاه داده الگوهای ترافیکی نگهداری میشود، منطبق کرد. در نتیجه با ترکیب نتایج میتوان، یک وضعیت خاص ترافیکی را تشخیص داد. برای مثال اگر زمان سفر در یک بخش، به صورت ناگهانی تغییر کند، نشان از یک واقعه مانند تصادف دارد. از سوی دیگر در این پایاننامه الگوهای ترافیکی گوناگون مانند تصادف را مورد بررسی قرار میدهیم. به این ترتیب با تطبیق این الگوها با هم، میتوانیم وقایعی مانند تصادف را به صورت برخط تشخیص دهیم.
در ابتدا باید تشخیص وقوع یک واقعه خاص در یک نقطه تفسیر شود. در واقع ما به راحتی نمیتوانیم وقوع یک تصادف در یک نقطه خاص را بیان کنیم، بلکه تنها میتوان صحبت از احتمال وقوع یک تصادف یا حادثه در یک نقطه خاص کرد. ساختار ساده شدهی یک تصادف به صورت کلی در شکل ۸ نشان داده شده است.

با بروز یک تصادف گرفتگی بعد از آن شروع شده و طول این گرفتگی با گذشت زمان بیشتر میشود. با نگاه به مدل موجود در معماری مبتنی بر مسیر، اگر یک گرفتگی در یک قطعه خیابان ایجاد شود، این گرفتگی به مرور به قطعههای منتهی به قطعه مورد نظر منتقل شده و این روند ادامه پیدا خواهد کرد. جریان ورود خودروها به قطعه مورد نظر بیش از جریان خروجی شده و نسبت ورود به خروج، رشد طول صف ایجاد شده را مشخص میکند. این رشد از ابتدای قطعه و با ایجاد شاخههای مختلف دیگر به راحتی قابل تشخیص نمیباشد. ولی به طور کلی خود مسئلهای است که در پایان این فصل کمی به آن پرداخته خواهد شد. در نهایت برای سادهسازی مسئله فرض میکنیم در طول زمانهای مشخص قطعه خیابانهای منتهی به مرور مسدود میشوند و تاثیر تصادف در خیابانهای یک سطح بعد هم دیده خواهد شد. در واقع اگر فاصله هر قطعه تا قطعه تصادف را در نظر بگیریم، فرض میکنیم بعد از زمان T (عددی بین ۲ تا ۵ دقیقه) تاثیر تصادف در قطعات با فاصله ۱ دیده شده و بعد از زمان ۲T تاثیر تصادف در قطعات با فاصله ۲ دیده میشود و این روند در طول زمان ادامه پیدا میکند. همچنین فرض میکنیم با گذشت زمان حداکثری T_a، حتی در صورتی که نمونهای از محل مورد نظر عبور نکند، مشکل تصادف مرتفع خواهد شد.
از نگاه مشاهدهگر، با دیدن یک گرفتگی در یک قطعه، پی میبریم که در قطعه مورد نظر یا قطعات بعدی گرفتگی ایجاد شده است. در نتیجه به صورت احتمالی، احتمال بروز تصادف در قطعه خیابانهای بعد از قطعه مشاهده شده، بررسی میشود.
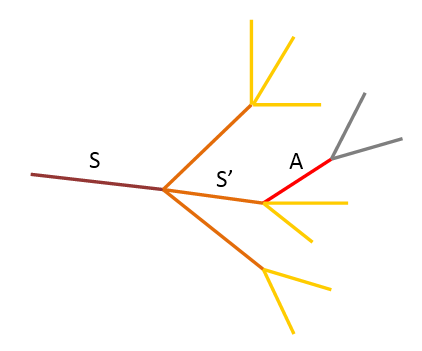
طبق شکل ۲، فرض میکنیم مشاهده در قطعه S و تصادف در قطعه A اتفاق افتاده باشد. فرض میکنیم احتمال تصادف در قطعه مشاهده شده µ و با هر یک واحد فاصله قطعات از محل مشاهده، احتمال بروز تصادف در α ضرب شود و احتمال وقوع تصادف تا زمانی جلو میرود که از حد T_a نگذرد. به این ترتیب قطعات با فاصله حداکثر k برای احتمال تصادف در نظر گرفته میشوند. برای مثال در شکل ۹، احتمال وقوع تصادف (مقدار µ) با فرض مشخص کردن α به شکل زیر محاسبه میشود (فرض میکنیم احتمال تصادف تا ۲ قطعه خیابان بعد از محل مشاهده ممکن میباشد، در واقع k=2):
![]()
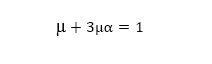
با ادامه حرکت مشاهدهگر، اگر مشاهدهگر از یکی از قطعههای غیر از S’ حرکت کند، تنها احتمال تصادف معطوف به دو مسیر دیگر شده و بار دیگر قابل اندازهگیری میباشد. همچنین با این اتفاق احتمال وجود تصادف در قطعه S کماکان باقی میماند. در نتیجه که در مثال شکل ۸ برابر میشود با:
![]()
همچنین اگر مشاهدهگر از قطعه S’ حرکت کند، این احتمال معطوف به قطعه S’ و قطعات بعد از آن میشود با این تفاوت که حد تخمین ۱ واحد کاهش پیدا کرده و احتمال تصادف تا k-1 رده محاسبه میشود. به این ترتیب برای مثال شکل ۸ خواهیم داشت:
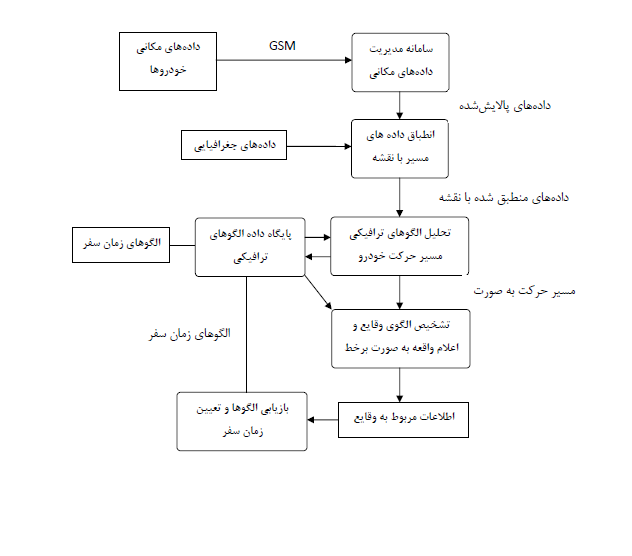
حال فرض میکنیم مشاهداتی از نمونههای مختلف در یک منطقه بدست بیاید. در این صورت باید روشی برای برهمنهی احتمالات داشته باشیم. هر یک از مشاهدات ما فضای احتمالاتی برای تصادف بوجود میآورد. حال فرض کنید فضای احتمالاتی دو مشاهده اشتراک داشته باشد. وجود دو مشاهده گرفتگی میتواند نشان از دو تصادف مختلف داشته باشد، ولی بدلیل آنکه دو مشاهده در نزدیکی یکدیگر اتفاق افتاده و دارای اشتراک میباشند، با کمی اغماض میتوان فرض کرد که تصادف در محل اشتراک دو مشاهده اتفاق افتاده است. به همین دلیل فضای احتمال بالا را برای فضای اشتراک دو مشاهده ایجاد میکنیم و ملاک ما برای در نظر فاصله، کمینه فاصله هر قطعه به هر یک از قطعات مشاهده میباشد.
با در نظر گرفتن مثال شکل ۹، اگر فرض کنیم مشاهدات در دو قطعه S و S” اتفاق افتاده باشد، داریم:
![]()
به همین روش میتوان برای مشاهدات بیشتر موضعی عمل کرد.
در هر صورت، ممکن است مشاهدهگری در زمان مناسب به محل تصادف نرسیده و در نتیجه تصادف کشف نشود. در این صورت تنها احتمال وقوع تصادف در قطعات مختلف برای ما باقی خواهد ماند. در این حالت تاثیر ایجاد صف در پشت نقطه تصادف در احتمال وقوع تصادف در قطعه مورد نظر ضرب میشود و این تاثیر برای خیابانهای مختلف محاسبه میشود.
فرض میکنیم با احتمال p در قطعه A تصادف شده باشد. تمام قطعاتی که با محدودیت T_a مسیری به قطعه A دارند را در نظر بگیرید. فرض میکنیم زمان سفر در قطعه A از زمان تصادف تا رسیدن سیستم به حالت عادی را داشته باشیم (TT_A(t)). با هر واحد دور شدن قطعات از قطعه A، این تابع برای قطعات بعدی با در نظر گرفتن ضریب محاسبه میشود. در واقع اگر قطعهای با فاصله ۲ به قطعهA برسد، ضریب تاثیر تابع زمان سفر در هنگام تصادف برای این قطعه خواهد بود. بدست آوردن تاثیر تصادف در زمان سفر و جریان ترافیک مسئلهی مناسبی برای تحقیق میباشد که در {؟} و {؟} هم به آن پرداخته شده است.
تشخص روان شدن ترافیک قطعههایی که در یک تصادف درگیر بودهاند، خود مسئله پیچیدهای میباشد. در واقع سرعت حل مشکل تصادف در مواقع و حالتهای مختلف متفاوت است. در نتیجه تابع زمان سفر در زمان تصادف یک حالت پیشفرض داشته و با حل سریع تصادف دچار کشیدگی در محور زمان میشود. حال اگر مشاهدهای از یک قطعه انجام پذیرد که وضعیت زمان سفر روانتر از حالت پیشفرض زمان سفر به هنگام تصادف با توجه به ضرایب تاثیر در قطعه مورد نظر باشد (در صورتی که ضرایب تاثیر مناسب انتخاب شده باشند)، میتوان فرض کرد تصادف رخ داده زودتر از زمان پیشفرض حل شده است. در این صورت با توجه به مشاهده انجام شده، نقطه مناسب بر روی تابع زمان سفر به هنگام تصادف برای قطعه مشاهده شده محاسبه شده و قطعههای منطقه تصادف به صورت مشابه دچار کشیدگی در طول زمان میشوند و در نتیجه وضعیت ترافیک و زمان سفر در همه قطعات بروزرسانی میشود. این حالت ممکن است ما را به نقطهای برساند که بتوانیم حل گرفتگی ایجاد شده بر اثر تصادف و رسیدن به شرایط پایدار را نتیجهگیری کنیم.
روشهای کلی گفته شده در این فصل برای ارائه راه حل کلی در این روش و معماری بوده است تا بتوانیم گرفتگیهای حاصل از تصادف را تشخیص دهیم. به دلیل اینکه تعداد تصادفاتی که ممکن است در یک لحظه در شهر اتفاق بیفتد کم میباشد، میتوان روشها و تحلیلهای پیچیدهتری را برای تشخیص تصادف و تخمین زمان سفر به هنگام تصادف به کار ببریم که نیاز به تحقیق بیشتری دارد. همچنین تخمین زمان سفر به هنگام تصادف خود مقولهای است که در این فصل به آن نخواهیم پرداخت. مطالعات و شبیهسازیهای زیادی در این باره صورت گرفته است که به صورت مناسبی قابل انطباق برای استفاده در این معماری میباشند که به یکی از این روشها بر مبنای ایده Kalman Filter در فصل {۲.۳.۶} اشاره شد.
لینک مطلب ویراتک شریف
شرکت ویراتک شریف با بهبود در استفاده از راهکارهای تحلیل ترافیک، به طور کلی هستهای برای تخمین زمانسفر و سامانهای برای اطلاعرسانی مسافر بوجود آورده است. بخش اول دغدغهی ما از جنبهی دقت تخمین میباشد؛ به طوری که بتوانیم تخمینهایی از زمان سفر ارائه کنیم که بتواند نیازمندیهای سیستم ما را برآورده کند. بخش دوم دغدغههای ما مربوط به جنبههای عملیاتی ایجاد هستهی تحلیل ترافیک است. در واقع باید در الگوریتمهای استفاده شده برای تحلیل زمانسفر یک شبکهی گسترده، بهبودهایی حاصل کنیم؛ در حدی که بتوان از این الگوریتمها برای چنین شبکهای استفاده کرد. در این مورد، هم بحث تحلیلهای غیربرخط و هم بحث تحلیلهای برخط و چگونگی بازیابی اطلاعات و تعیین زمان سفر، باید مورد بررسی قرار گیرد.
در مجموع میتوان هدف ویراتک را، ایجاد یک سیستم کامل پیشبینی زمان سفر دانست. مبنای اصلی کارهای ما برای بخش تخمین، استفاده از ایدههای مبتنی بر دادههای مکانی میباشد. در حال حاضر فعالیتهای زیادی بر روی این ایده انجام نشده است. در واقع در این ما در ویراتک سعی داریم، با نصب دستگاههای مجهز به GPS بر روی خودروها و با بهرهگیری از ساختار ارتباطی شبکهی GSM روشهایی ارائه کنیم که به صورت برخط دادههای مکانی خودروها را دریافت کرده و با تحلیل آنها، اطلاعات مربوط به زمان سفر را استخراج کند. به این ترتیب اولا، با ارائهی راهکارهایی با کارآیی بالاتر و ارائهی یک معماری جدید، سعی در بهبود روشهای قبلی میکنیم. در درجهی دوم، با در نظر گرفتن محدودیتهای زمانی و کارآیی برای یک سیستم برخط، سعی در ارائهی الگوهایی برای تشخیص وقایع به صورت برخط میکنیم.
ایدههای زیادی برای تحلیل ترافیک به هنگام تصادف، تشخیص تصادف و شرایط ترافیک قبل و بعد از تصادف وجود دارد که در حال حاضر نیز تحقیقات زیادی بر روی آن انجام شده است. تشخیص جریان ترافیک در این شرایط، نیاز به دادهبرداریهایی با حجم بالا دارد تا سیستم بتواند در سریعترین زمان ممکن از وضعیت و مکان حادثه با خبر شود. پیدا کردن روشهایی که با هزینهی کم و کارآیی بالا بتوانند حوادثی مانند تصادف را تشخیص دهند، از مسائلی است که هنوز ذهن بسیاری از محققان را به خود مشغول کرده است و یکی از زمینههایی میباشد که در ویراتک به آن توجه میشود.
معماری مبتنی بر GPS
در معماریهای ارائه شده بر مبنای نقاط GPS، مبنای تصمیمگیری سیستمهای تحلیل ترافیک، تعیین میزان ترافیک به صورت نقطهای میباشد. در واقع در این نوع معماریها، یک پارامتر مشخص انتخاب میشود و الگوهای این پارامتر برای هر نقطه جغرافیایی در طول زمان تحلیل شده و تخمین زده میشود. به این ترتیب تحلیل ما به صورت محلی معنادار است.
برای مثال تابع مشخص v(t,x) نشاندهنده سرعت متوسط در زمان t در نقطه x را در نظر بگیرید. بر مبنای این معماری، مقادیر ثبت شده در نقطه x در طول زمان نگهداری میشود و به صورت تحلیلی بر مبنای شباهت زمانی نقاط ثبت شده با زمان t مانند زمان مشخص در روزهای قبل، الگوی سرعت در زمان مورد در نقطه مورد نظر بدست میآید.
این معماری به دلیل استفاده از نمونههای در حال حرکت بسیار کارا میباشد و به ما کمک میکند تا بتوانیم نمونههایی در مکانهای جغرافیایی متفاوت داشته باشیم. این امر دقت تخمین به صورت نقطهای را به دلیل کم شدن نمونهها پایین میآورد، ولی در عین حال باعث گسترده شدن سطح نمونهبرداری میشود. نکته قابل توجه این است که وجود نمونهبرداری نقطهای با نصب شمارنده در یک محل دقتی به مراتب بالاتر از حد نیاز را برای ما فراهم میکند و این در حالی است که این سطح دقت با توجه به هزینههای نصب برای ما نیاز نیست. به این ترتیب ما با در حرکت بودن نمونهها میتوانیم با نمونههای بسیار کمتر سطوح جغرافیایی گستردهتری را پوشش دهیم. همچنین ساده بودن تکنولوژی GPS نسبت به تکنولوژیهای شمارنده و قیمت به مراتب کمتر آنها، باعث میشود تا بتوانیم با قیمت معادل یک شمارنده که تنها میتواند در یک نقطه نصب شود، تعداد زیادی نمونه در حال حرکت داشته باشیم.
مشکل اصلی در این معماری، وجود تغییرات زیاد در دادههای بدست آمده از طریق GPS میباشد که باعث میشود نمونههای بدست آمده دارای دقت پایینی باشند. برای مثال سرعت یک خودرو در طول یک مسیر ممکن است تغییرات زیادی داشته باشد که نمونهبرداری ما را دچار مشکل کند. این مشکل با گرفتن نمونههای زیاد در طول زمان حل شده و الگوی مورد نظر به سمت میانگین میل میکند. ولی چون پارامتری از جنس زمان در این تخمین تاثیرگذار است باعث میشود نمونههای زیادی در طول زمانهای مختلف برای بالابردن دقت گرفته شود که خود از ضعفهای این معماری به حساب میآید.
معماری مبتنی بر مسیر
ایدهی کلی کار ترکیب روشهای سریزمانی و روشهای مبتنی بر تشخیص الگوها مانند شبکههای عصبی برای تشخیص الگوهای زمان سفر و نگهداری این الگوها برای استفادههای بعدی است. به این ترتیب با دریافت دادههای مکانی از خودروها، الگوهای زمان سفر با استفاده از این روشها بروز رسانی میشوند. در نتیجه به نوعی سری زمانی تا نقطه خاصی برای تخمینهای آینده نگهداری میشود.
تفاوت عمده این معماری با معماری مبتنی بر GPS در این نکته است که مبنای تحلیل ما در این روش زمانسفر نمونه در مسیرها یا بازههای مشخص میباشد. در نتیجه در این روش ما به دنبال تحلیل زمانسفر در بازهی مورد نظر خواهیم بود و الگوهای مورد نظر را با توجه به بازهها و مسیرها نگهداری خواهیم کرد. برای مثال بازهی بین دو ایستگاه اتوبوس برای یک اتوبوس، پارامتر مناسبی برای تحلیل زمانسفر یک اتوبوس خواهد بود. نکته قابل توجه در این معماری این است که به دلیل وجود نگاه بازهای به مکان، امکان نگهداری و تحلیل ماهیت زمانسفر خواهد بود. از آنجایی که زمان سفر، ماهیت مناسب و قابل سنجشی از طرف تحلیلگر و استفاده کننده سیستمهای حمل و نقل میباشد، در نتیجه میتوان امیدوار بود تکیه بر این معماری تحلیلهای مناسب و تخمینهای خوبی برای ما رقم خواهد زد.
یکی از نکات قابل توجه در این معماری کاهش هزینههای اجرا و نگهداری سیستمهای تحلیل میباشد. در سیستمهای ایستگاهی که به دنبال تحلیل جریان ترافیک در ایستگاههای مختلف هستند به دلیل وجود تکنولوژیهای پردازش تصویر و یا دیگر تکنولوژیها، نیاز به تحلیلهای محلی در ایستگاه خواهیم داشت. به همین ترتیب به نوعی یک جریان پردازش توزیعشده در درون معماری قرار دارد. جریان دریافت دادههای مکانی از خودروها، تحلیل و بازیافت پارامترهای و الگوهای ترافیکی در این معماری همگی در سمت سرور انجام میشود. محلی بودن این کار یک مذیت به حساب خواهد آمد ولی در عین حال دغدغه باید جبنههای کارآیی و حجم اطلاعات در نظر گرفته شود. برای مثال دادههای مکانی ۲۰۰۰ اتوبوس شهر مشهد در یک بازه ۱ ماهه که در دورههای زمانی ۵ ثانیهای مختصات خود را ذخیره میکردند در حدود ۳۰ گیگابایت حجم داشته و چیزی بالغ بر ۱ میلیارد نقطه را در بر میگیرد. این اعداد نگرانی ما را برای تحلیل و نگهداری دادهها و الگوها و چگونگی تحلیل و بازیابی زمانسفر از این حجم داده بر میانگیزد.
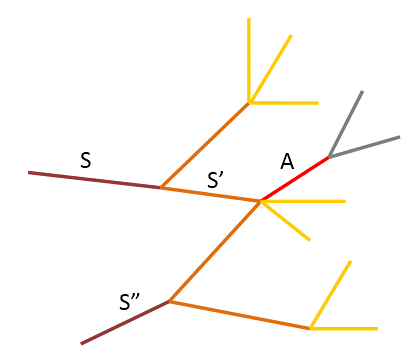
به این ترتیب در این فصل تلاش میکنیم معماری طراحی کنیم که علاوه بر تحلیل مناسب ترافیک و ارائه تخمین خوب از زمان سفر با توجه به معیارهای ارزیابی ارائه شده، بتواند جنبههای کارآیی سیستم را نیز در بر بگیرد و به صورت عملیاتی قابل استفاده باشد. شکل ۱ نمای کلی معماری ما بر مبنای جریان دادهها را نمایش میدهد.
شکل ۱ – معماری مبتنی بر مسیر
در این معماری ما به تحلیل مسیر حرکت خودرو میپردازیم و با تک دادههای دریافتی از خودرو کاری نداریم. به این ترتیب قدرت ما برای تحلیل مسیر حرکت به منظور پیدا کردن زمان سفر و الگوهای حرکت خودروها بسیار بالا میرود.
معماری ارائه شده، ساختار کلی معماری مورد نظر در این پایاننامه میباشد؛ در ادامهی این فصل، معماری و الگوریتمهای بخشهای مختلف این معماری مشخص شده و جنبههای مختلف هر یک مانند کارآیی مورد بررسی و تحلیل قرار خواهند گرفت.
جنبهی دیگر مسئله، پیدا کردن مجموعهای مناسب از خودروها میباشد که با قرار گرفتن سیستم مورد نظر بر روی آنها بتوانیم به خوبی دادههای ترافیکی شهر را دریافت، ذخیره و بروزرسانی کنیم. به این منظور برای مثال میتوان سیستمهای GPS را بر روی خودروهای آژانس و یا تاکسی قرار داد. اینکه این سیستم دقیقا در چه خودروهایی قرار گیرد و چه حجمی از خودروها لازم است تا دادههای کافی برای تحلیل یک شبکهی ترافیکی بزرگ مانند تهران را داشته باشیم، خود مسئلهای است که در این پایاننامه مورد توجه قرار خواهد گرفت.
لینک مطلب ویراتک شریف

مجری: ITS مخفف سامانه هوشمند حمل و نقل است. سپتامبر جاری بیست و یکمین کنگره جهانی ITS برای اولین بار به دیترویت می آید. اسکات بلچر مدیر اجرایی ارشد این کنگره امروز صبح میهمان ماست. خوش آمدید.
بلچر: خوشحالم که در خدمت شما هستم.
مجری: من وقتی به این موضوع علاقمند شدم که در نوعی نمایشگاه سالانه که توسط شرکت میشلن برای نمایش فناوری برپا شده بود شرکت کردم. وقتی نگاهی عمیق به آینده حمل و نقل و شیوه جابجایی افراد بر روی کره خاکی مان می اندازیم، خواهیم دید که در یک نقطه اوج زمانی ایستاده ایم که شباهتی با گذشته ندارد. آیا چنین نیست؟
بلچر: دقیقا. ما در نقطه ای از تاریخ قرار داریم که حمل و نقل در حال یک دگرگونی کامل است. بازیگران جدیدی میبینیم. بازیگران موجود دگرگونی هایی را تجربه می کنند که پیش از این برایمان قابل تصور نبود. شرکت هایی مانند فورد و جنرال موتورز درباره برقراری ارتباط میان خودروها بحث می کنند، بگونه ای که بتوانند از تصادفات پرهیز کنند. صحبت درباره خودروهای خودمختار، یعنی خودروهایی که خود را بحرکت در می آورند بسیار متداول شده است. درباره تحرک پذیری مبتنی بر استفاده مشارکتی از خودرو بحث می کنیم. چه کسی فکر می کرد دایملر کرایسلر به این موضوع بپردازد. و ما در سراشیبی تندی قرار داریم. بسوی پیش رفتن و استفاده از داده ها به شیوه هایی کاملا جدید تا سامانه های حمل و نقل کارآمدتر و موثرتر از گذشته عمل کنند.
مجری: ما شاهد دو رویداد متفاوت هستیم. نخست اینکه، روش براه انداختن خودروها برای مدتی طولانی موضوع بحث بوده است. همه مایلند ما را از سوخت های فسیلی دور کنند و برای این کار دلایل متعددی دارند. لیکن به باور من در مورد اینکه روی چه سوختی برای آینده باید توافق شود مشاجره طولانی وجود داشته است. اینکه آیا یک سوخت یا تعداد مختلفی از سوخت های پاک لازم است. برای مثال همانطور که می دانید هیدروژن، سوخت های انعطاف پذیر، تمامی اینها گزینه های ممکن هستند. آیا باید در مورد سوخت آینده به یک توافق برسیم؟
بلچر: بدترین کاری که می توانیم انجام دهیم این است که بر روی یک فناوری واحد متمرکز شویم. اگر این کار را انجام دهیم از تحول فناوری غافل شده ایم. بنابراین باید در برابر انواع جدید فناوری گشایش داشته باشیم. چیز دیگری که درباره آن صحبت نکردهایم، در کنار صحبت هایی که درباره خودروهای برقی، پیل های سوخت هیدروژن و تمام این فناوری های جذاب صورت میگیرد، تغییرات فرهنگی است که در حال روی دادن است. و ما در حال حرکت بسوی محیطی هستیم که میتوان از آن به عنوان تحرکت پذیری اشتراکی یاد کرد. یعنی استفاده افراد از خودروها، رانندگی مشترک و حمل و نقل مشترک. فرزندان من بجای خودروهای خود بیشتر بر گوشی های همراه خود تمرکز دارند. بنابراین نسل متفاوتی در برابر ماست. معنی این امر این نیست که خودروها در این کشور یا کانادا در حال حذف شدن هستند، بلکه نحوه استفاده از آنها در حال تغییر کردن است. از دیدگاه کاربری، اگر سن شما از حدی بالاتر باشد، تماس با یک فرد و درخواست از او برای رانندگی مشترک ممکن است مسخره بنظر برسد. اما در مورد یک فرد جوان چرا که نه؟ این امر واضح بنظر می رسد. چرا باید کنار خیابان ایستاده و برای یک تاکسی دست تکان دهید در حالی که می توانید با آن تاکسی تماس بگیرید، یا با یک جرثقیل تماس بگیرید تا شما را سوار کند و در عین حال بدانید که چه زمانی به مقصد مورد نظر شما میرود.
مجری: شما درباره خودروهایی صحبت می کنید که با یکدیگر سخن می گویند و واقعا یک شبکه تو در توی متصل به هم از شبکه عظیم حمل و نقل ما تشکیل می دهند. فکر می کنید تا تحقق این موجودیت چقدر فاصله داریم؟
بلچر: شما نمونه ای از آنرا در ماه سپتامبر مشاهده خواهید کرد. نمایشگاهی از آنها در پارک جزیره Belle Isle در رودخانه دیترویت برپا خواهد شد. شما خودروهای مرتبط، خودروهایی که با یکدیگر سخن می گویند تا از تصادفات پیشگیری کنند و خودروهای خودمختار را خواهید دید، خودروهایی که بدون نیاز به راننده به حرکت در می آیند. مردم در حالی سوار خودروهای خود می شوند که تمامی انواع فناوری را در آن مشاهده کرده و پیشرفت روزافزون آنها را خواهند دید. جنوب شرق میشیگان، رهبری کشور را در این زمینه در دست دارد و در حقیقت هدایت کننده دنیا در زمینه فناوری ارتباطات خودرویی است. در این ایالت بیشترین تعداد خودروهای مرتبط در تمام دنیا در حال تردد هستند. به همین دلیل مردمی از 65 کشور دنیا در میشیگان حضور خواهند یافت تا راهبری این ایالت در فناوری حمل و نقل دنیا را به چشم خود ببینند.
مجری: تا دیدن یک خودروی مرتبط در پارکینگ خانه خود چقدر فاصله داریم؟
بلچر: گمان کنم در سه تا پنج سال آینده فرصت ارتباط همراه در خودروی خود و بهره مندی از فناوری ارتباطات خودرویی را داشته باشیم. این فناوری باعث نجات جان انسانها و کاهش 80 درصد از تصادفات مشتمل بر خودروهای غیرمعیوب خواهد شد، یعنی چهارتا از هر پنج نفر درگیر در تصادفات. ما سالانه یک تریلیون دلار در نتیجه تصادفات خودرو در این کشور از دست می دهیم. بیش از 34 هزار نفر هر سال جان خود را از دست می دهند. این فناوری می تواند 80 درصد از تصادفات مشتمل بر خودروهای نامعیوب را بکاهد.
مجری: این امر موجب شعف است، لیکن برخی موجبات نگرانی را نیز به همراه دارد. اگر به این سامانه وابسته شویم، این ارتباطات متقابل آسیب پذیری هایی نیز ایجاد می کنند. می توانم تحقق یک فیلم علمی تخیلی را مشاهده کنم که در آن فردی راهی برای کنترل خودروها و کوباندن آنها به هم می یابد. این امر با مقدار زیادی مخاطرات نیز همراه است.
بلچر: مطمئنا. خودروسازان زمان و پول زیادی برای دور نگه داشتن دست افراد بدکار از کنترل فناوری و ممانعت از این رویدادهای ناخوشایند صرف خواهند کرد و زمانیکه درباره یک شبکه متفاوت صحبت می کنیم، این امر اهمیت بیشتری می یابد. در اینجا نیز پول زیادی برای حفظ امنیت سایبری صرف خواهیم کرد.
مجری: تنها نیم دقیقه باقی مانده است. شما درباره یکی از هیجان انگیزترین رویدادها با من صحبت کردید. شرکت های چالاک باعث گسترش میدان عمل شده و پای شرکت های بزرگتر را به میان خواهند کشید تا در برنامه توسعه فناوری شرکت کنند.
بلچر: برخی از شرکت هایی که مسئول تحول در حمل و نقل هستند همان شرکت های سنتی حمل و نقل نیستند. آنها شرکتهایی تازه تاسیس در دره سیلیکون هستند. این شرکت ها از فناوری در راه هایی متفاوت استفاده می کنند. شرکت هایی مانند گوگل، اینتل، کوالکوم، اینها هستند که دارند دنیا را تغییر میدهند.
لینک خبر